El rover europeo de la misión MMX a Marte: el primer vehículo con ruedas que explorará Fobos
Por Daniel Marín
En 2024 Japón tiene planeado lanzar la sonda MMX (Martian Moons Exploration) con el objetivo de traer a la Tierra una muestra de Fobos, la mayor luna de Marte. La misión cuenta con una importante participación internacional e incluye la colaboración de países como Estados Unidos, Francia y Alemania. Pero, más allá del objetivo principal de recogida de muestras, quizás la parte más atractiva de la misión será el despliegue de un rover europeo. Por primera vez, un vehículo recorrerá la superficie de Fobos, un vehículo que será también el primero dotado de ruedas que se desplace por un cuerpo menor de baja gravedad.
 |
El rover francoalemán que llevará la sonda japonesa MMX (DLR).
|
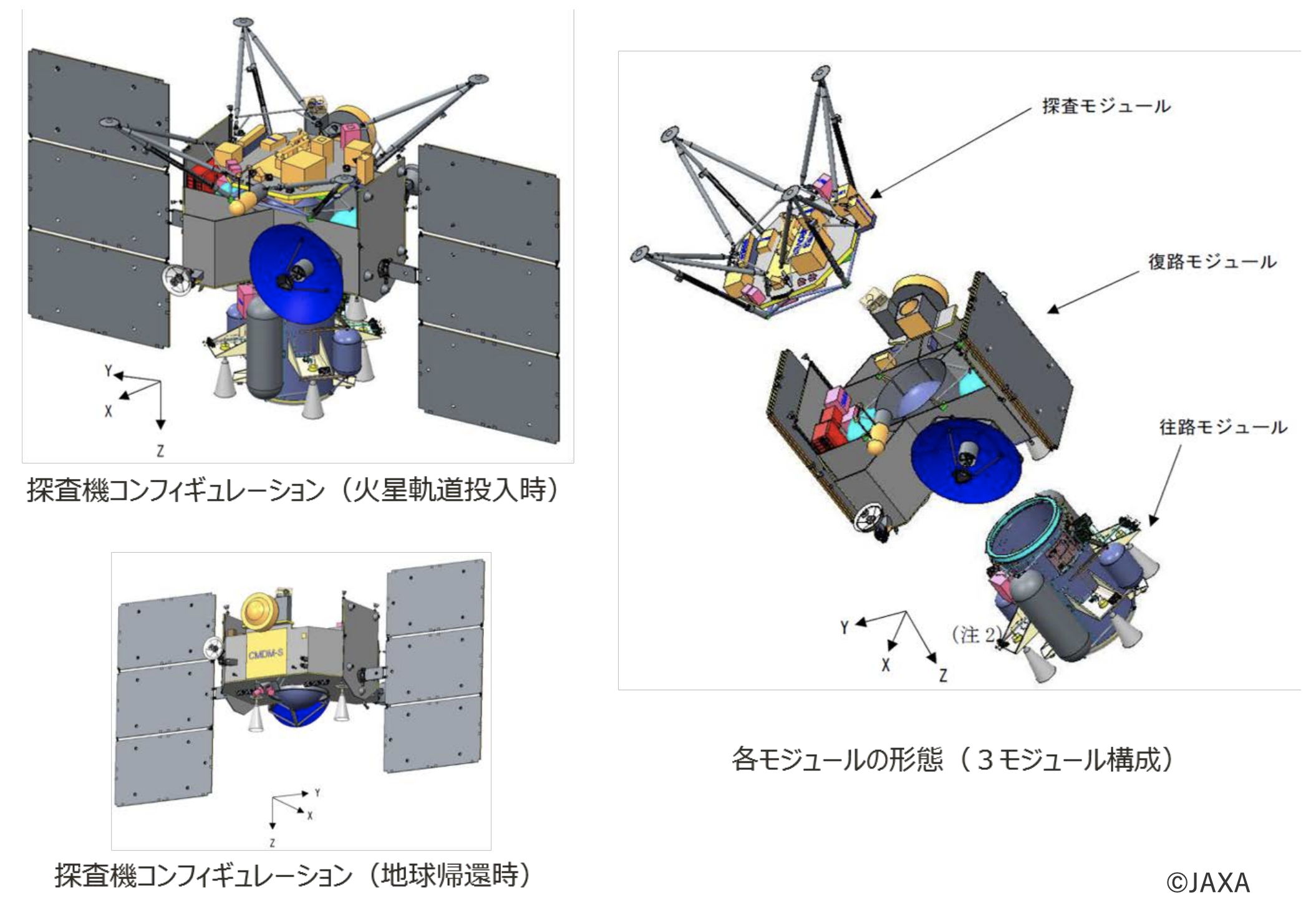
MMX (火星衛星探査機 en japonés) es una sonda de unas 4 toneladas de masa que llegará en 2025 a la órbita de Marte. La sonda está dividida en tres módulos e incluye un tren de aterrizaje para posarse sobre Fobos y una cápsula donde se guardarán las muestras, que deben aterrizar en la Tierra en julio de 2029. Durante la fase de aterrizaje en Fobos, MMX depositará el rover europeo, que, por el momento, se denomina simplemente MMX Rover (MMXローバ). El rover, que es una colaboración entre el DLR y el CNES —las agencias espaciales de Alemania y Francia, respectivamente— sigue los pasos de la colaboración entre ambas agencias en la misión japonesa Hayabusa 2 de retorno de muestras del asteroide Ryugu, que incluyó el aterrizador europeo MASCOT.
 |
La sonda japonesa MMX se aproxima a Fobos (JAXA).
|
 |
Elementos de la sonda MMX. El rover viajará en el tren de aterrizaje (JAXA).
|
 |
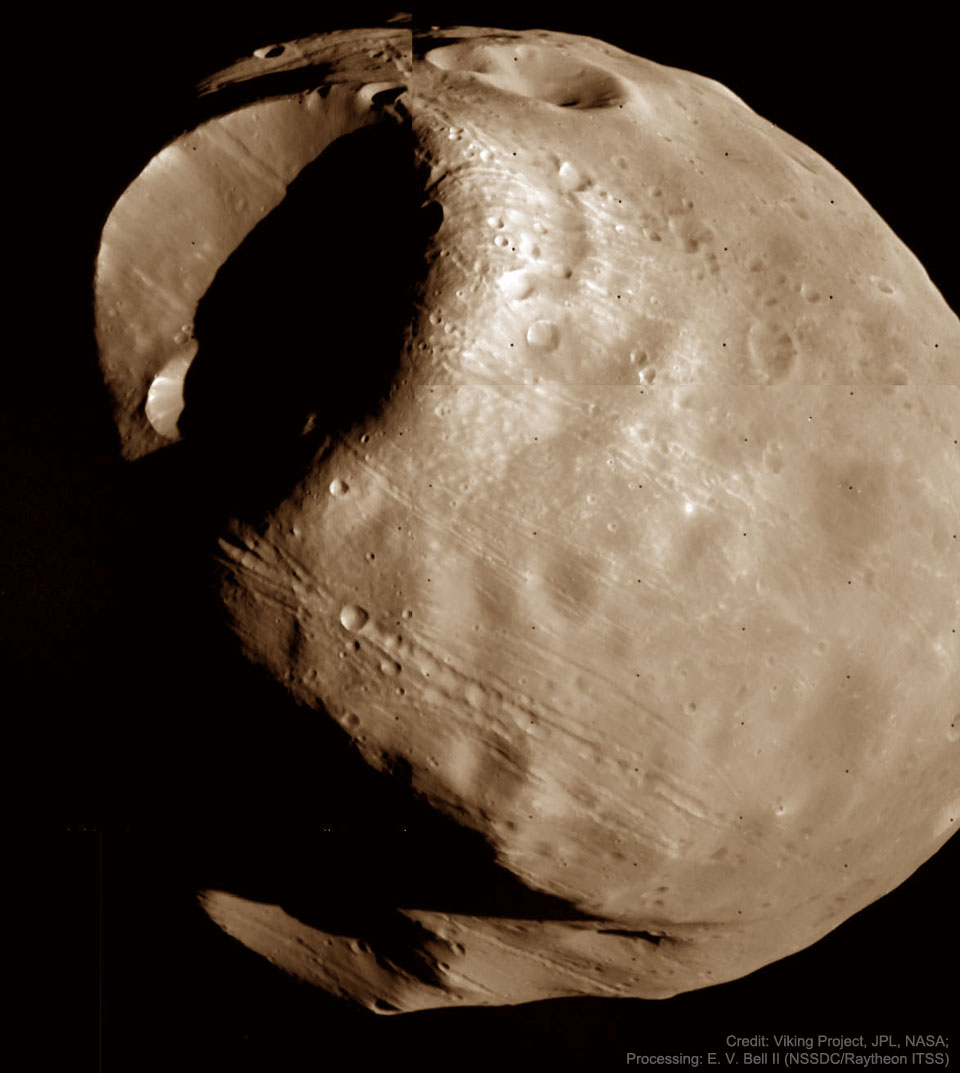
Fobos (Viking Project, JPL, NASA / Edwin V. Bell II /NSSDC/Raytheon ITSS).
|
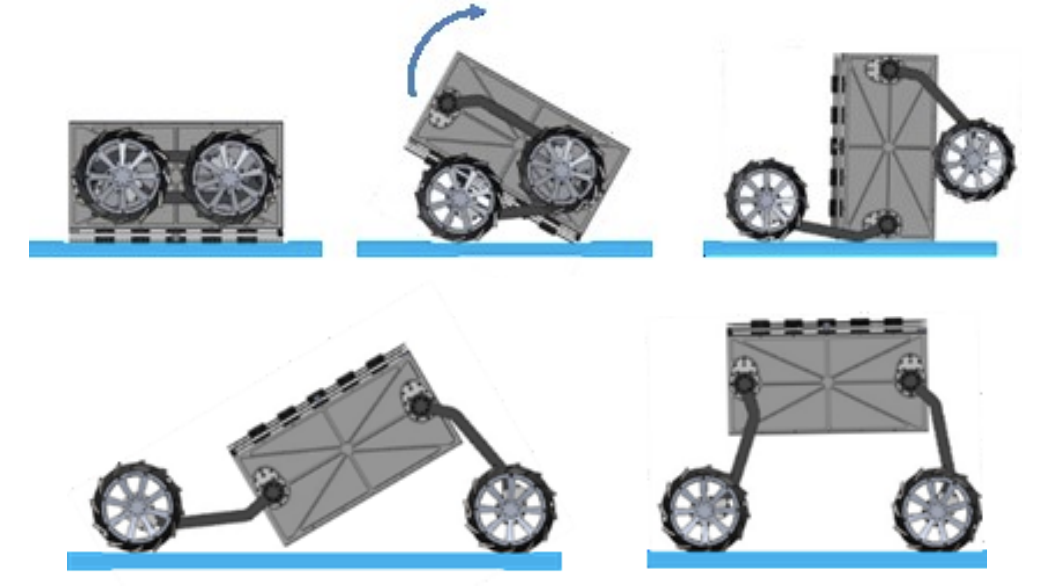
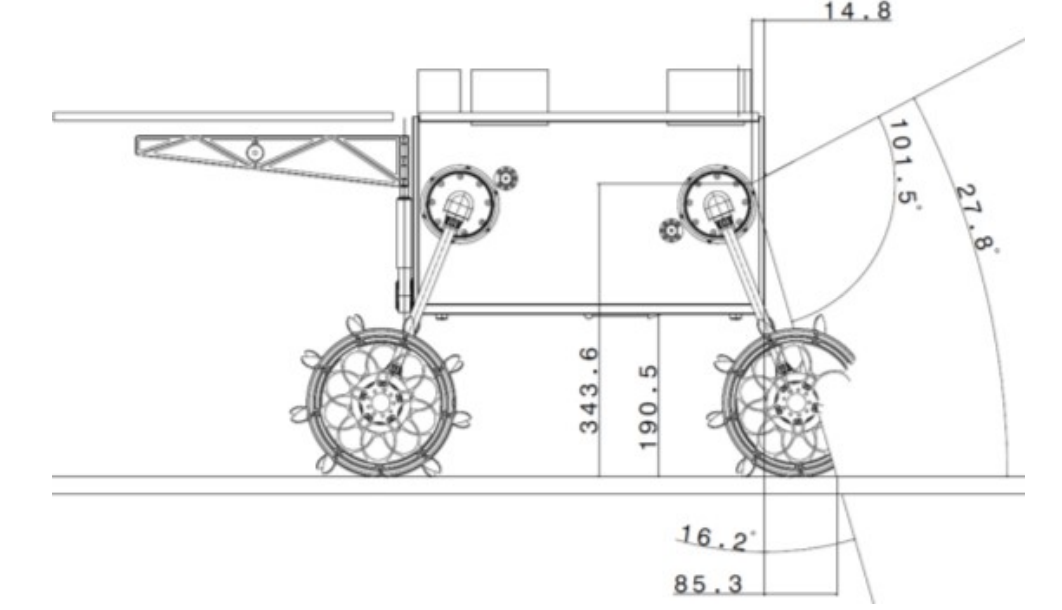
MMX Rover será un pequeño vehículo con una masa de solo 29 kg y unas dimensiones de 44 x 52 x 35 centímetros. A pesar de la baja y variable gravedad superficial de Fobos (0,0057 m/s²), el rover se desplazará usando cuatro ruedas. MASCOT y los otros aterrizadores de Hayabusa 2 usaban resortes internos para dar saltos por la superficie del pequeño asteroide Ryugu en vez de rodar por la misma, ya que la baja gravedad del asteroide hacía imposible moverse de otra forma. La gravedad de Fobos está en el límite de lo que resulta recomendable si queremos emplear ruedas. De hecho, las subsondas de la misión soviética Fobos de los años 80 incluían mecanismos saltadores y no ruedas. El rover, en forma de caja, se desplegará desde la sonda MMX en configuración plegada y una vez en la superficie se pondrá en la posición correcta gracias a una ingeniosa secuencia de despliegue de las ruedas.
 |
El rover en configuración de viaje en la sonda MMX (DLR).
|
 |
El rover se podrá poner en la posición adecuada incluso si aterriza cabeza abajo (DLR).
|
 |
Si el rover cae de lado también podrá colocarse en la posición correcta (DLR).
|
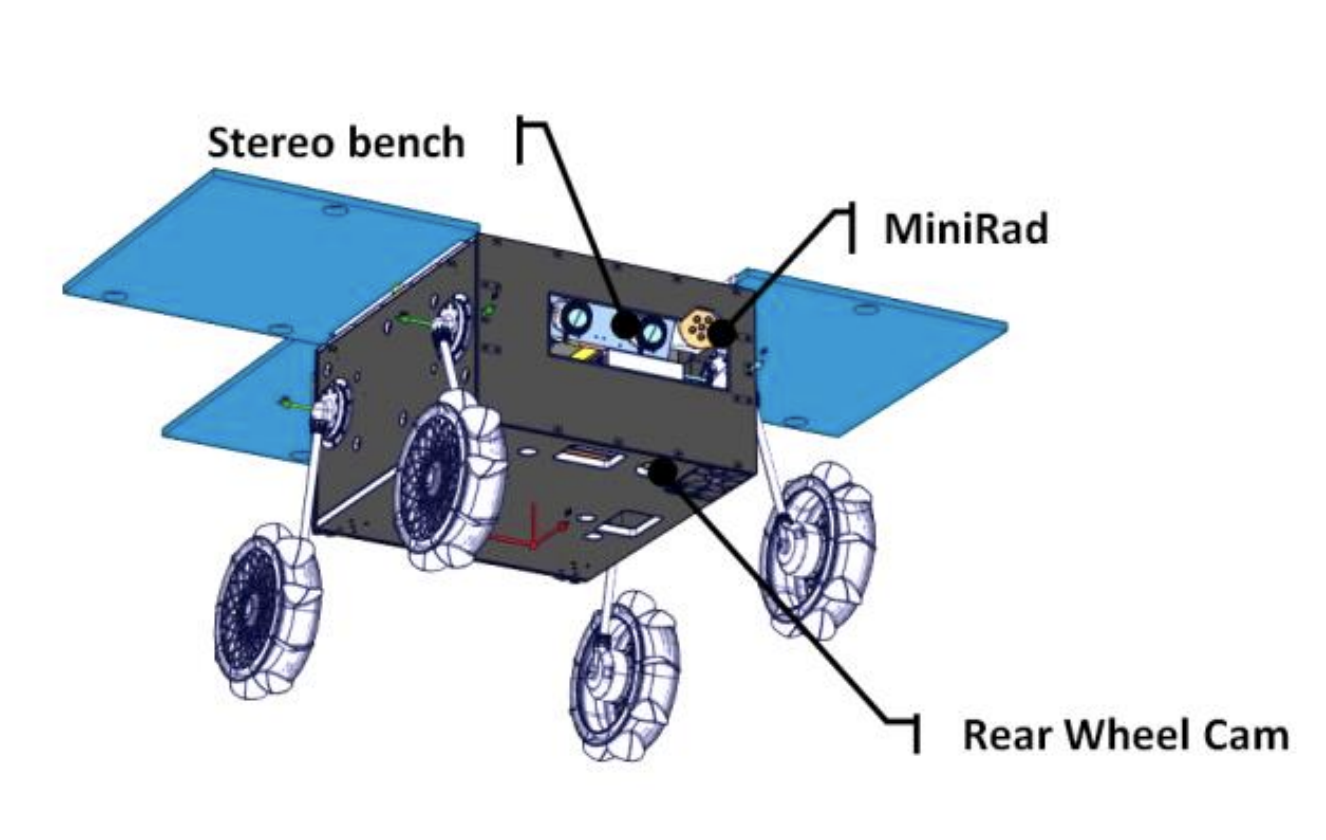
El MMX Rover llevará varios instrumentos: el espectrómetro Raman RAX (derivado del espectrómetro de ExoMars 2022), la cámara infrarroja miniRAD (basada en el instrumento MARA de MASCOT), el sensor GRASS para medir la aceleración gravitatoria y su sentido, el radar GRAMM para estudiar el subsuelo de Fobos hasta una profundidad de cien metros y un conjunto de cámaras. Las cámaras incluyen dos cámaras frontales a color de navegación NavCAM (con sensores de 2048 x 2048 píxeles) y otras dos cámaras WheelCAM en blanco y negro que observarán la zona de contacto entre las ruedas frontales y el suelo. Las WheelCAM llevarán además iluminación mediante LEDs de varios colores para conducir por la noche.
 |
Tres de los principales instrumentos del rover (DLR).
|
 |
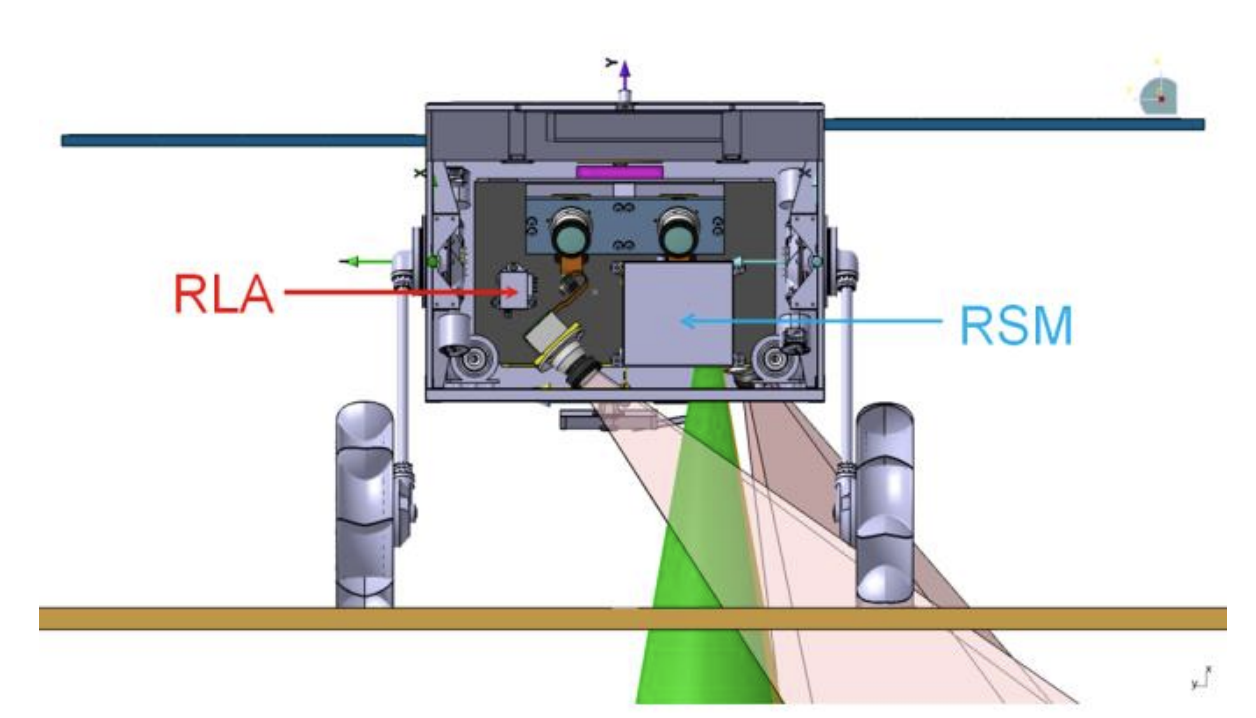
Situación de los instrumentos (DLR).
|
El desplazamiento por la superficie no será sencillo. Nadie sabe a ciencia cierta cuáles son las propiedades mecánicas del regolito de Fobos. Simplemente con el hecho de desplazarse por la superficie y observar las huellas de las ruedas aprenderemos mucho. Por otro lado, el rover no se podrá comunicar directamente con la Tierra y usará la sonda MMX como retransmisor, lo que implica que el retraso entre el envío de las órdenes y la conducción real será del orden de horas o días, según la posición de la sonda con respecto a Fobos. Por eso, irá equipado con un sistema de conducción autónoma avanzado derivado del que usa el rover Rosalind Franklin de Mars 2022. la velocidad de desplazamiento será muy baja, de entre 0,1 y 4 milímetros por segundo (o sea, un máximo de 14,4 metros por hora). Si fuese más rápido, el rover podría dar saltos de varios metros en el vacío y caer al revés, dañando sus paneles solares.
 |
Campo de visión de las cámaras NavCAM (DLR).
|
 |
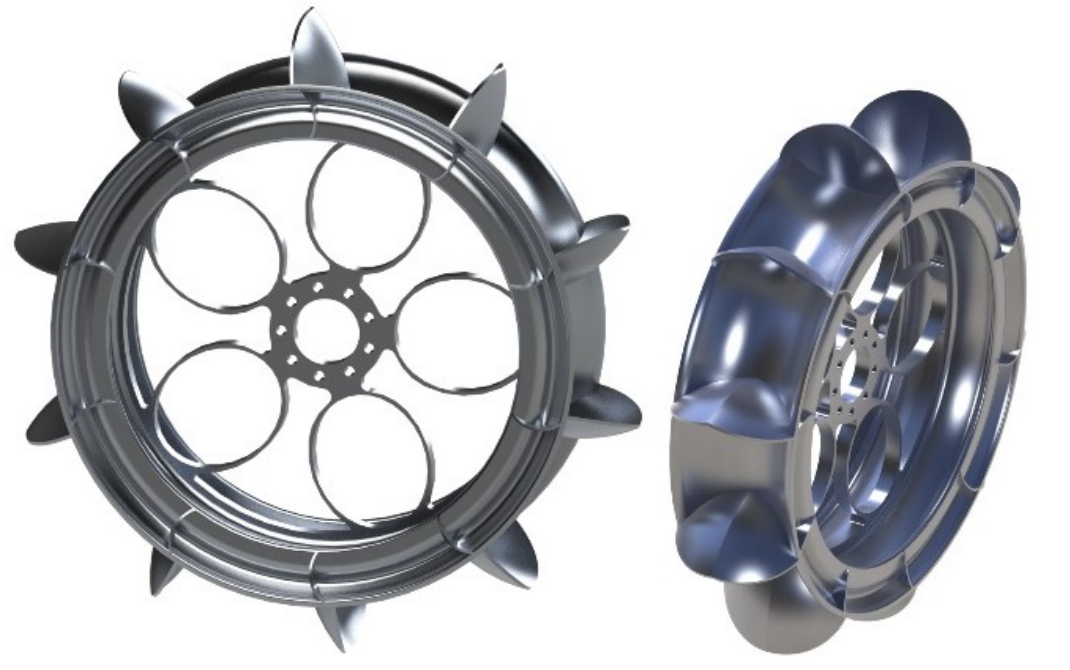
Detalle de las ruedas (DLR).
|
Cada una de las cuatro ruedas contará con su propio motor eléctrico. La energía del rover correrá a cargo de tres paneles solares que, según las simulaciones, permitirán generar entre 85 y 109 Wh de energía por cada día de Fobos (de 7,5 horas de duración, sin contar los «eclipses» al pasar por la sombra de Marte). La mayor parte de la energía se usará para mantener el interior del rover caliente, ya que Fobos es un lugar bastante frío.
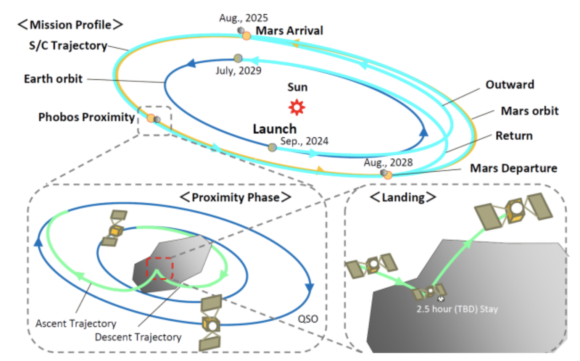 |
Fases de la misión MMX (JAXA).
|
El rover MMX nos ofrecerá vistas fantásticas de la mayor Luna del planeta rojo y ayudará a determinar si, efectivamente, Fobos se formó como resultado del impacto de un asteroide contra el Marte primigenio. Si todo sale bien, en solo cinco años veremos a este pequeño vehículo moverse alrededor de Fobos.
 |
Sonda MMX (JAXA).
|















No hay comentarios:
Publicar un comentario